


The National Sample Survey Organization (NSSO) Report, 2002, estimates the number of disabled people in the country to be 18.5 million out of which over 10 million have some kind of locomotor disability. Developing assistive devices for people affected by locomotor impairments is a key focus area of R2D2 located in the Machine Design Section in the Department of Mechanical Engineering at IIT Madras. The goal is to engineer and develop indigenous solutions that are functional and affordable.
A person with lower limb disability may have to use a wheel chair for the entire life. In a conventional wheelchair the user spends time in a seated position all the time. This constraint gives rise to many physical as well as mental health related issues such as sore body, building of pressure points leading to pressure sores, lowered blood circulation, and dependence on other people for basic needs. One solution to this problem is to provide mechanisms in the wheel-chair to assist the person to stand. The first prototype was developed by Harshal Chaudhari (DD, 2012).
The second prototype shown was developed by students NT Saikiran, Sai Prakash Reddy and Parivarthan with support from Muthuvishvaswaran and Sandilya Bharathi. This prototype also includes a reclining mechanism, which was removed in later versions to reduce complexity. Other students who have worked on this include Sushant Veer (B.Tech, 2013) and Sumit Pethwajadkar (DD, 2013). The third prototype designed by Vivek Sarda has been tested with several users with Spinal Cord Injury (SCI) - their response has been very positive. The development was funded by the Socially Relevant Projects scheme of IIT Madras until Dec 2014. The design is now in the process of development towards commercialization in partnership with Phoenix Medical Systems and the Rehabilitation and user community (CMC Vellore, APD, the Spinal Foundation, and others), with support provided by the Wellcome Trust under their Affordable Healthcare in India scheme. Vivek Sarda and Swostik Dash lead this project.
Arise, the Standing Wheelchair was launched on November 05, 2019 at the IIT Madras Research Park. The device will be manufactured and marketed by Phoenix Medical Systems.

New Auditorium | D Block 7th Floor | IIT Madras Research Park
Tuesday, 5th November 2019 | 11:30 AM
The conventional method of controlling a wheelchair is through the use of a joystick. There are some impairments like cerebral palsy (CP), muscular dystrophy, high levels of spinal cord injury etc., where people may not have the fine motor control required to operate a joystick. In the case of children with CP, providing means of independent mobility contributes to numerous areas of cognitive and sensory development that is otherwise denied. In this work, an alternate mechanism has been designed for wheelchair operation, which detects gross body motion to control the wheelchair.
The Body-Motion wheelchair can be controlled by the motion of any body part like head/trunk/hand/leg, etc. When the user moves his/her body forward/sideways, the wheelchair goes in the forward/sideways direction. This method of control also provides therapeutic benefits to the user. The flexibility of the control mechanism allows it to be customized to the user's abilities, so that users can use whatever body part movement they are capable of to control the wheelchair.
A pediatric version of the chair has been developed that is close to a product version of the concept. The device has undergone field testing at Vidya Sagar: about 10 children with CP (at Gross Motor Function Classification System (GMFCS) levels of 4 and 5) were trained to control the wheelchair.
Features of the device:
Vivek Sarda worked on this device as part of his DD project (2013-14). A provisional patent application has been filed for this device. This project was funded by the Innovative Student Projects (ISP) scheme of IIT Madras, an alumni initiative. We are working on further product development for eventual commercialization.
This project involves the conceptual design, development and testing of a Polycentric Knee joint for persons with Transfemoral (above-knee) amputation. Also referred to as a "four-bar" knee, it has advantages over a hinge joint because of the multiple axes of rotation. The knee provides stability during the early stance phase of walking, yet is easy to bend to initiate the swing phase or to sit down. The four-bar knee causes the leg's overall length to shorten reducing the risk of stumbling. While the concept of a polycentric knee has been around for a long time in western countries, this aims to be the first indigenously designed knee from first principles (Prof. Radcliffe's seminal work), specifically optimized for users who have to navigate uneven terrain. The geometry is obtained by optimization based on certain hypotheses derived from literature and its suitability will be verified by clinical trials. The Instant Centre (IC) curve of this knee is markedly different from other commercially available knees.
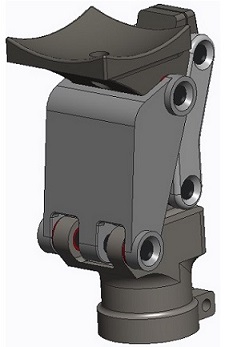
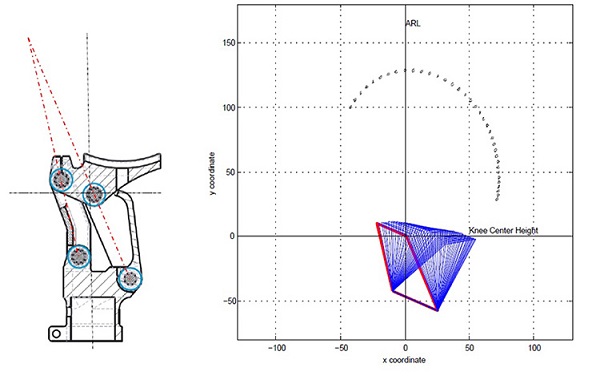
The initial clinical trial conducted at Mobility India was very promising. The user was able to immediately recognize the stable nature of the knee. Despite having a very short residual limb to control the prosthesis, he was able to leave the safety of the parallel bars and take on open spaces in the initial trial itself. The knee also performed well while going up and down a ramp.
The knee design was the M. Tech project of T S Anand (2013-14) and was funded by the Society for Biomedical Technology (SBMT). We are working on design refinements and multiple prototyping to try the knee unit on users with different residual muscle capabilities. We also intend to perform gait analysis to quantitatively evaluate the design.
People with locomotor impairments do not have any means for full body exercise while constrained to a wheelchair. Swimming provides them an opportunity for exercise along with an immense sense of freedom since the water supports their body weight. To make swimming pools accessible to physically challenged, assistive devices are required and a swimming pool lift serves the purpose. The figure shows the sequence of operation of the lift. The motorized prototype designed by student Swostik Sourav Dash (DD, 2013) was demonstrated at the Velachery SDAT Aquatic Complex in July 2013. A new prototype that is manually operated has been designed and was put to use extensively during the State Level Paralympic Swimming Championships held at Velachery SDAT Aquatic Complex in July 2015.

The most extensively used wheel chair in India is a manually driven wheel chair. A manual wheelchair requires the user to have considerable upper limb strength to propel the wheelchair. The required effort is multiplied when the user needs to move on uneven terrain or travel longer distances. One solution is a motorized wheelchair but the cost of a motorized wheelchair ranges from INR 65,000/- to a whopping INR 3.7 lakhs, depending on the functionality of the wheelchair. Thus, one of the prime constraints is the cost of a motorized wheel chair. In addition to this, existing motorized wheelchairs pose several challenges to users including portability and weight (powered wheelchairs weigh more than 45kgs). A common drawback seen in powered wheelchairs is the lack of modularity; they cannot be easily folded or disassembled. This makes it difficult to transport the wheelchair when not being used. Most powered wheelchairs cannot be easily used when not powered. This prevents the usage of the wheelchair in manual mode, which could be a major problem in case of a power failure. These were the motivating reasons for the project. The power-assist we have developed for a manual wheelchair addresses these issues. The first design was developed by Sripriya Kalidoss, SD Karthikeyan and Vivek Sarda.
The objective of this project is to develop a self-propelled mobility device for children with locomotor disability like cerebral palsy (CP) to give them a means of independent mobility. The existing walkers are either too difficult for some children with CP to use independently or too expensive. The project's goal is an affordable, ergonomic independent mobility device for such children who may otherwise be able to walk only with support from a caregiver. The walker we are developing can enable children with CP to walk independently with minimal assistance and reduce the burden on the caregiver as well. The first design was developed by Vivek Sarda with support from Sandilya Bharathi.
The NeoRider is an add-on device that converts a regular wheelchair into an outdoor mobility device. Currently there is no mobility solution for rural areas that can meet both indoor and outdoor needs. There exist separate products - a wheelchair for indoor use and tricycle for outdoor use. The solution to the problem is NeoRider: an attachment that converts a wheelchair into an outdoor mobility device within 2 seconds (patent pending) enabling the user to seamlessly maneuver over rough terrain with safety & ease. The outdoor attachment is a standalone product and can be used with most of the popular wheelchairs. The device has the potential to bring a paradigm shift in the mobility of wheelchair users, significantly improving their quality of life. This design won the second place at the ICRC's Enable Makeathon 2016 for Team Aseem comprising Swostik Dash, Vivek Sarda and Ashish Sharma. R2D2's startup NeoMotion is working on commercializing a motorized version of the add-on and a new robust wheelchair.
Most KAFOs available in India have knee joints with drop-locks - two for each braced limb. The user has to bend down to lift the locks to enable the knee to bend for sitting down. This is difficult and can be embarassing in crowded places such as buses. Bilateral users find it especially difficult to operate the drop locks on both limbs simultaneously to sit down. In addition, when a KAFO user stands up, the drop locks can sometimes get stuck and not lock automatically, leading to instability and safety concerns. Current designs of these orthotic knees also have protruding parts that tear clothes. Imported alternatives to the drop lock are very expensive, mostly available only in urban areas and require frequent maintenance. Our simple design of a lever-operated joint (EZ-LOK) joint solves all these problems. Users operate a single lever unobtrusively located at the hip to unlock the joint. The lock clicks into place when the user stands up. The design has been developed by Ganesh Bapat (PhD scholar) with support from Muthuvishvashwaran, Mohan Varma and Seethapathi. A Design Patent has been granted by the Indian Patent Office for this design (No.290752).

Optimus is a manual lever-operated wheelchair for use outdoors in rough terrain. The design makes use of locally available bicycle parts and is therefore easily repairable and affordable. The mechanism to attach and detach the lever is very easy to use so that the user can easily switch chair to push rim mode. The elongated base frame ensures stability on rough terrain. With brakes located on the pushing levers, the user can stop the chair quickly. The wheelchair has a small turning radius making it easily maneuverable in tight spaces. The wheelcahir is also foldable, making it easy to transport. The design has been developed by Saish Kapadi (B.Tech 2014) with support from Rajesh and Sandilya Bharathi.